Node-RED Integration: Connecting the OSRC to Robots
Node-RED Integration with the OSRC
Node-RED plays a crucial role in enabling seamless communication between the Open Source Robotics Controller (OSRC) and robots on the same local network. By leveraging MQTT channels, we can send commands from the OSRC’s joysticks, buttons, and touchscreen to a Raspberry Pi (RPI) in the robot.
How It Works
- Node-RED on the OSRC:
- The OSRC runs a Node-RED instance that acts as the central hub for processing inputs from the controller’s hardware (joysticks, buttons, and touchscreen).
- These inputs are converted into MQTT messages and published to specific topics, such as
robot/movementorrobot/action.
- Raspberry Pi on the Robot:
- The robot is equipped with a Raspberry Pi that subscribes to the MQTT topics published by the OSRC’s Node-RED instance.
- The Raspberry Pi processes these messages to control the robot’s motors, sensors, or other components, such as lights or actuators.
- Local Network Communication:
- Both the OSRC and the robot’s Raspberry Pi are connected to the same local network.
- The robot’s Raspberry Pi connects to the OSRC’s Node-RED instance using its IP address and subscribes to the relevant MQTT topics.
Understanding MQTT and Node-RED Communication
MQTT (Message Queuing Telemetry Transport) is a lightweight messaging protocol designed for low-bandwidth, high-latency networks. It is ideal for IoT applications like robotics. Here’s how MQTT works in this setup:
- Publish/Subscribe Model:
- The OSRC (via Node-RED) acts as the publisher, sending messages to specific topics (e.g.,
robot/movement). - The Raspberry Pi on the robot acts as the subscriber, listening to these topics and executing commands based on the received messages.
- The OSRC (via Node-RED) acts as the publisher, sending messages to specific topics (e.g.,
- Broker:
- An MQTT broker (e.g., Mosquitto) is used to manage the communication between the publisher (OSRC) and subscriber (robot). The broker ensures that messages are delivered to the correct subscribers.
Node-RED simplifies the process of integrating MQTT into the system:
- Input Nodes: Node-RED can receive joystick, button, or touchscreen inputs from the OSRC hardware.
- MQTT Output Nodes: These nodes publish the processed inputs to MQTT topics.
- MQTT Input Nodes: On the robot’s Raspberry Pi, Node-RED can subscribe to these topics and trigger actions like motor control or sensor activation.
Example Workflow
- Joystick Movement:
- The joystick on the OSRC sends directional input to Node-RED.
- Node-RED processes the input and publishes an MQTT message to the topic
robot/movementwith payloads like{"x": 0.5, "y": -0.3}for forward-left movement.
- Button Press:
- A button press triggers a specific action, such as toggling a light or activating a sensor.
- Node-RED publishes the action to the topic
robot/actionwith payloads like{"light": "on"}.
- Touchscreen Commands:
- The touchscreen interface allows for more complex commands, such as setting waypoints or adjusting parameters.
- These commands are published to topics like
robot/settingswith payloads like{"speed": 0.8, "mode": "autonomous"}.
Dashboards on the Robot Controller
One of the key features of our Node-RED setup is the use of interactive dashboards on the OSRC. These dashboards provide a user-friendly interface for monitoring and controlling the robots in real time. They are accessible via a web browser and are fully customizable to suit different use cases.
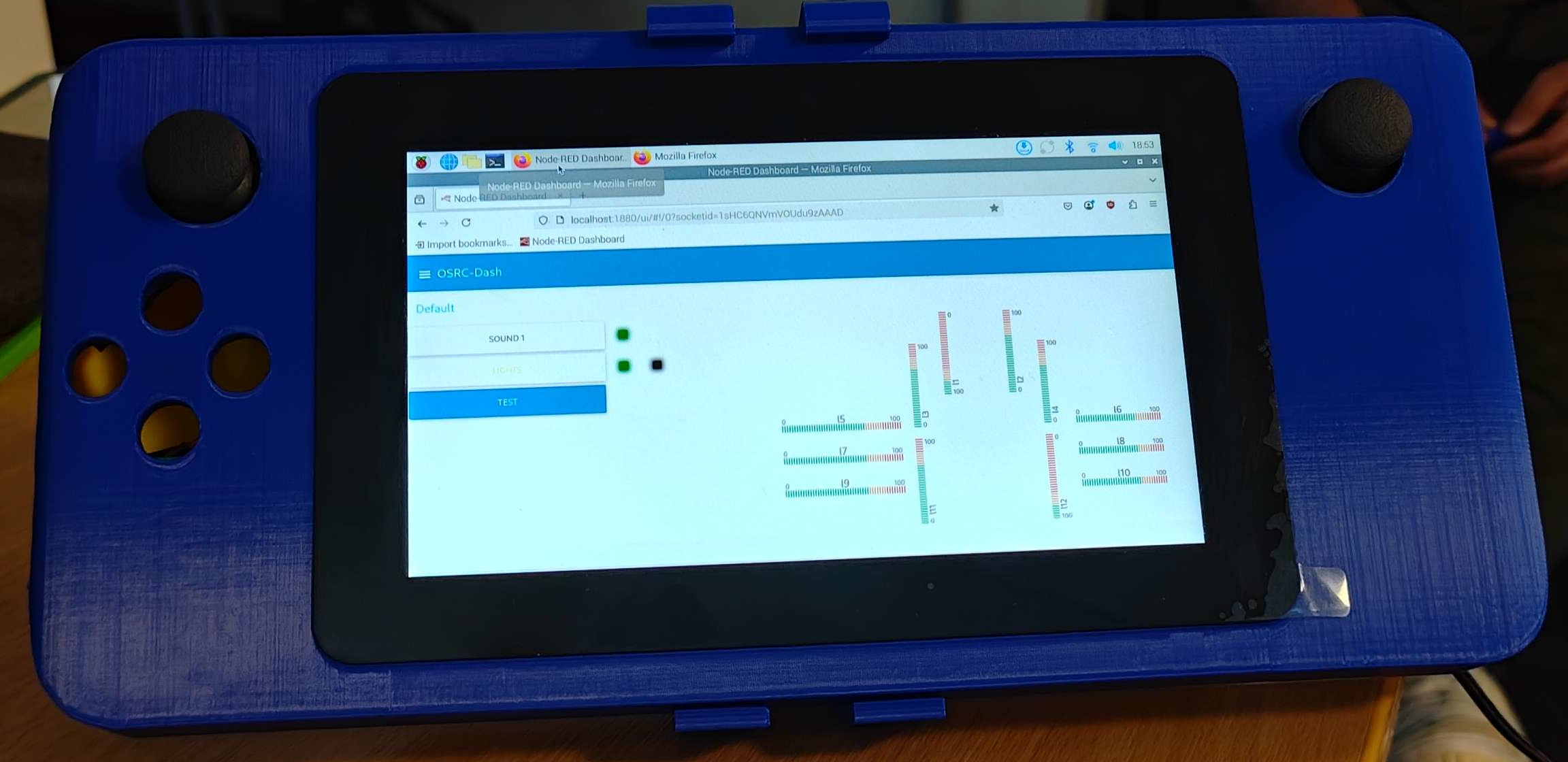
Above: A custom node-red dashboard used by our Dalek.
Features of the Dashboards
- Live Data Monitoring:
- The dashboards display real-time data from the robot, such as sensor readings, battery levels, and motor statuses.
- This allows operators to quickly assess the robot’s condition and make informed decisions.
- Control Interfaces:
- Buttons, sliders, and other UI elements on the dashboard allow operators to send commands directly to the robot.
- For example, you can adjust speed, toggle lights, or activate specific functions using the dashboard.
- Visual Feedback:
- Graphs and gauges provide visual feedback for critical parameters, such as motor temperatures or network latency.
- This helps in diagnosing issues and optimizing performance.
- Customizable Layouts:
- The dashboards can be tailored to specific tasks or robots, ensuring that only the most relevant information is displayed.
Example Use Cases
- Joystick Visualization:
- A live visualization of joystick inputs is displayed on the dashboard, showing the direction and intensity of movement commands being sent to the robot.
- Sensor Data:
- Sensor readings, such as distance from obstacles or environmental conditions, are plotted in real time for easy monitoring.
- Command Logs:
- A log of recent commands sent to the robot is displayed, allowing operators to track actions and debug issues if needed.
Integration with Node-RED Flows
The dashboards are tightly integrated with the Node-RED flows:
- Input Nodes: Data from the robot is fed into the dashboard using Node-RED’s dashboard nodes.
- Output Nodes: Commands issued from the dashboard are processed by Node-RED and published to the appropriate MQTT topics.
Images
We will include images of the dashboards here to illustrate their functionality and design. These images will showcase:
- The layout of the control interface.
- Real-time data visualizations.
- Examples of how the dashboards are used during operation.
The dashboards are a critical part of our system, providing an intuitive and powerful way to interact with the robots.
Visualizing the Node-RED Flows
With Node-RED, you can create visual flows to manage the communication. For example:
- Input Flow: A flow that reads joystick inputs, processes them, and publishes MQTT messages.
- Output Flow: A flow on the robot’s Raspberry Pi that subscribes to MQTT topics and triggers GPIO pins or motor controllers.
Benefits of Using Node-RED and MQTT
- Real-Time Communication: Commands are sent and received with minimal latency, ensuring responsive control.
- Flexibility: Node-RED’s drag-and-drop interface makes it easy to modify or expand the system.
- Scalability: Additional robots or devices can be integrated by subscribing to the appropriate MQTT topics.
- Cross-Platform: MQTT and Node-RED work seamlessly across different hardware and operating systems.
Next Steps
We are continuously improving the Node-RED workflows to enhance the OSRC’s capabilities. Future updates will include:
- Advanced error handling and feedback mechanisms.
- Integration with additional sensors and actuators.
- Support for multiple robots communicating with the OSRC simultaneously.
Stay tuned for more updates as we refine this powerful integration!